哈工大报讯(化文)在国家自然科学基金支持下,我校微系统与微结构制造教育部重点实验室贺强教授团队在胶体马达领域取得重要进展,研究成果以“热敏高分子刷调控自泳驱动阴阳型微马达运动方向”(Thermoresponsive Polymer Brush Modulation on the Direction of Motion of Phoretically Driven Janus Micromotors)为题发表在国际著名期刊《德国应用化学》(Angew. Chem. Int. Ed.,影响因子12.102)上。贺强教授和化工与化学学院吴英杰副教授为共同通讯作者。
胶体马达能将周围环境中存储的化学能转化为自推进运动的胶体粒子,亦称活性胶体或游动微纳米机器人,可作为物理模型帮助人们理解生命系统中的自组织行为,并可用于仿生构筑具有涌现性自组织、自修复等特性的活性材料,也有望为生物医学(特别是精准医疗)带来革命性的解决方案。当前化学驱动胶体马达的运动速率主要依赖于人为改变燃料浓度调控,而其运动方向是通过外部磁场的操控来实现,仍然不能够像生物体如游动细菌那样自主感知周围环境变化并自主调控运动方向和运动速率。
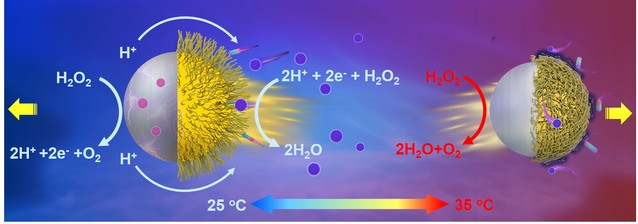
针对这一难题,该研究团队首次在金-铂双金属阴阳马达的金侧原位生长了热敏聚异丙基丙烯酰胺(PNIPAM)高分子刷。当温度为25℃,金表面的高分子刷链是伸展和亲水状态,允许物质在高分子刷内的自由扩散和表面反应的进行,胶体马达以8.5μm/s的速率沿Au-Pt方向运动,驱动机理为自电泳;当温度上升至35℃,高分子刷链是塌陷和疏水状态,马达以2.3μm/s的速率沿Pt-Au方向运动,驱动机理为自扩散泳。这种周围环境温度变化引起高分子链构象的可逆转变导致马达自推进方向和速率相应改变的策率,有望使合成胶体马达感知周围环境变化(如温度)而进行趋向或远离目标源的自主运动,展现类似游动细菌趋向性的智能行为,对未来新型微纳米机器的开发与应用具有重要的意义。
论文链接:https://onlinelibrary.wiley.com/doi/10.1002/anie.201812860